センシングトレイ
光線スイッチ
分解モジュール
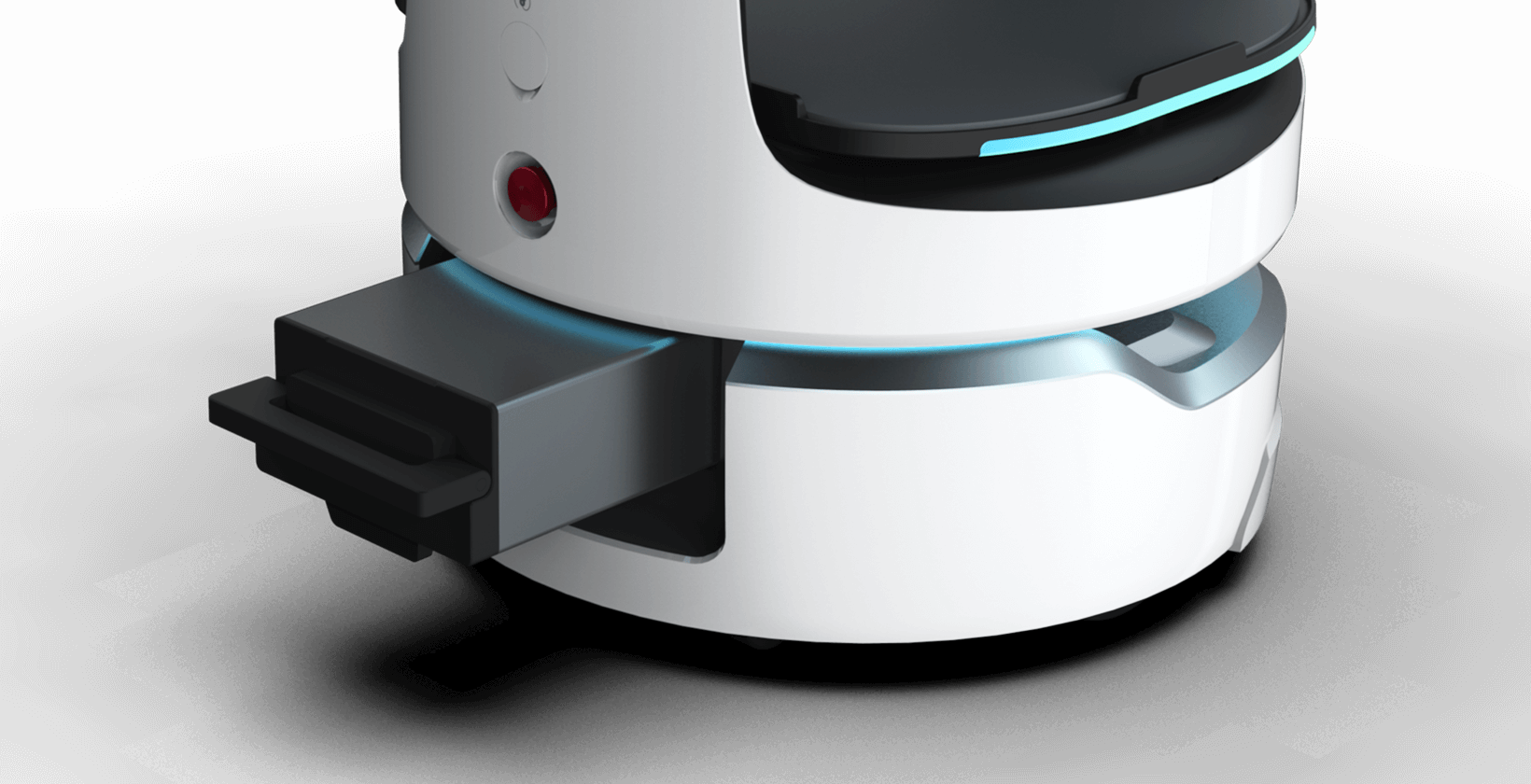
バッテリー交換方式
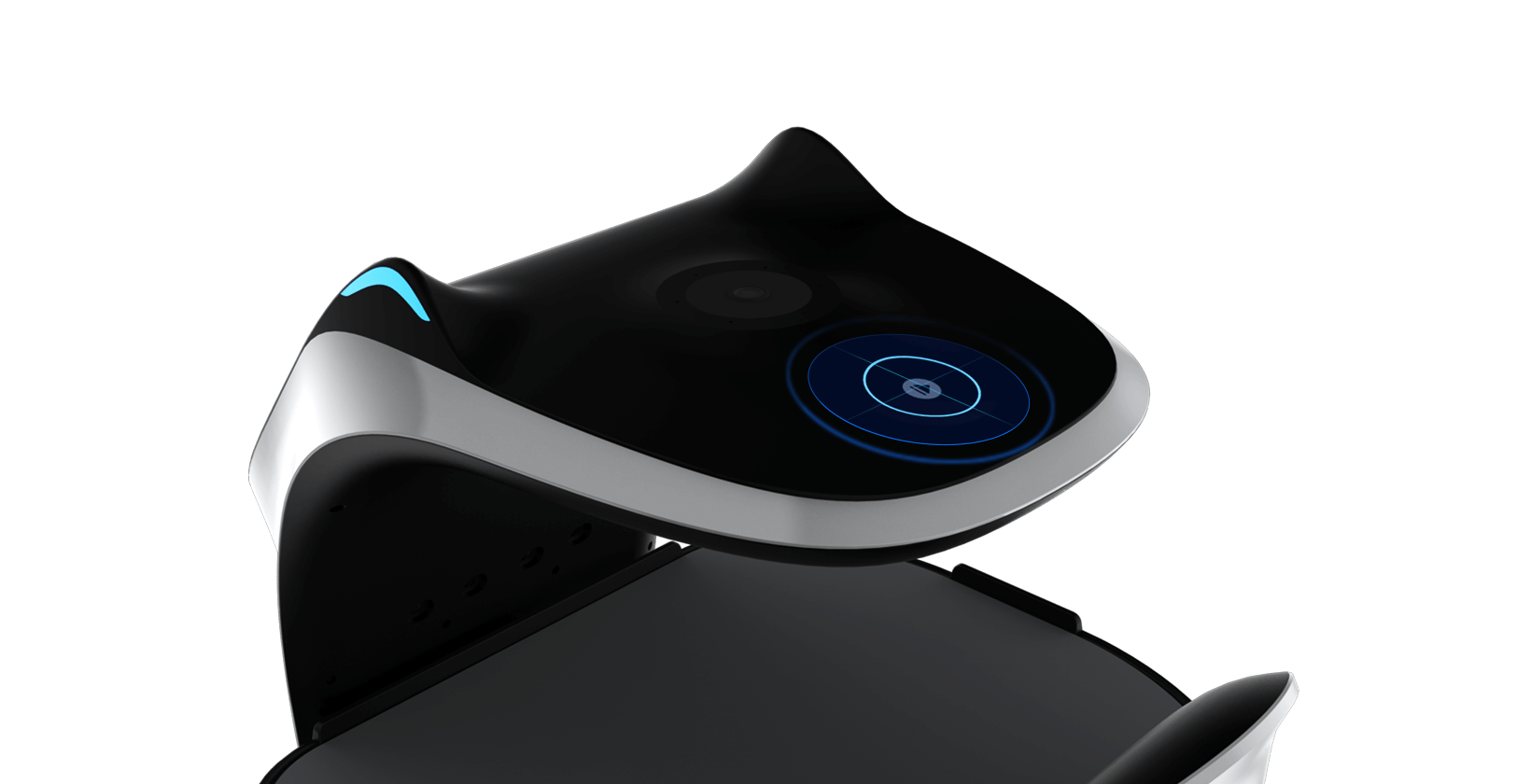
インテル製RealSense D435センシングカメラを搭載。ヒトの肉眼と同じメカニズムで実空間の視覚情報を計測・処理することで、自分の位置と対象物の位置を正確に把握します。


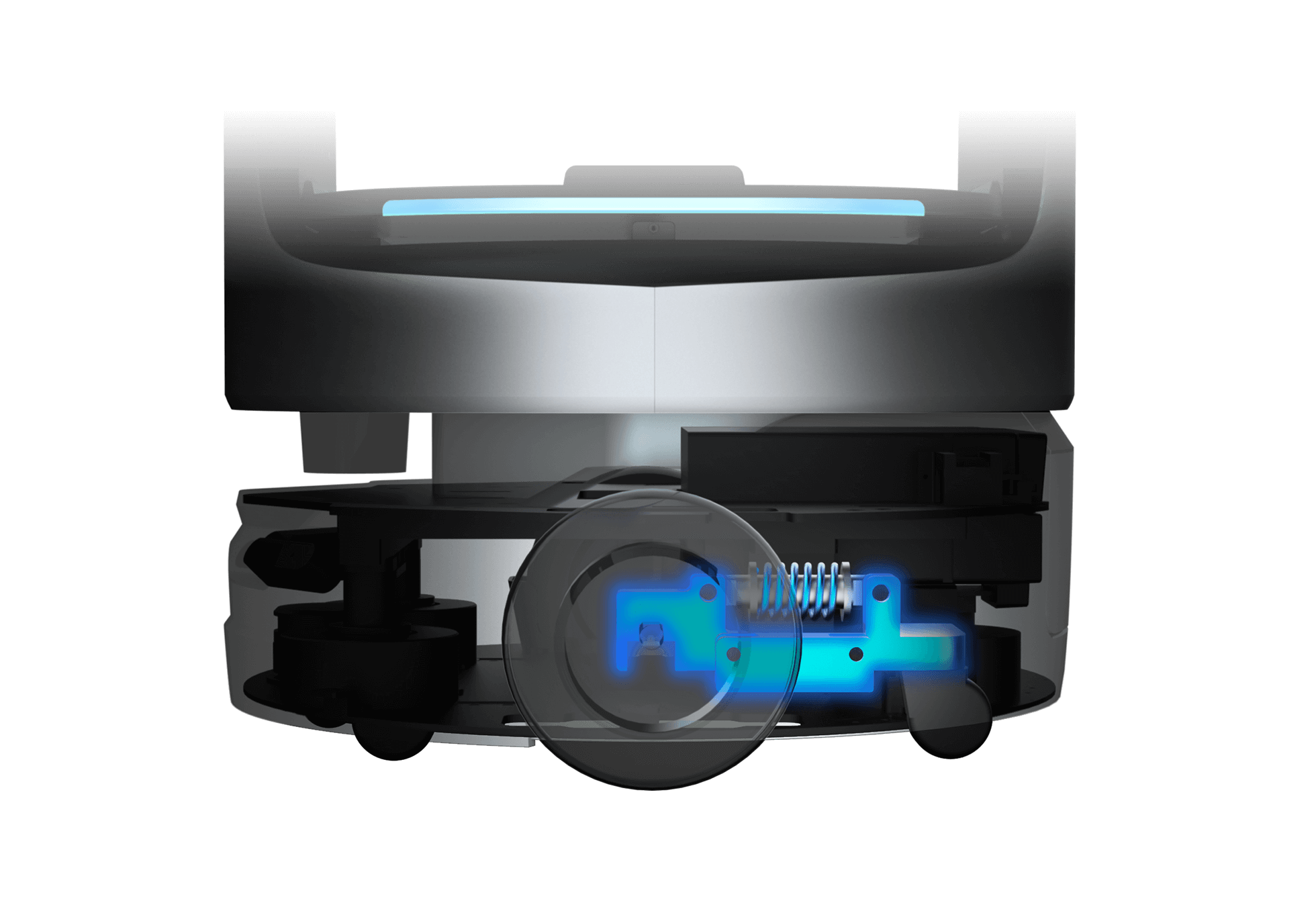
BELLA専用に開発した独立懸架サスペンションが、路面の凹凸を効率的に吸収。高度な免震機能を実現します。
SLAMとは地図作成と自己位置測定を同時に行う技術のことです。私達はこの技術に徹底的にこだわり、極めて複雑なレストランの形状にも迅速に対応できるロボットの開発に成功しました。
全方位3Dセンサーを標準搭載。進行方向に存在するあらゆる障害物を検知。
絶妙な角度で回避していきます。
障害物実質検知高度 20cm
障害物センシング回数 5400回/分
進行方向検知角度 192.64°
前方障害物感知距離 10m
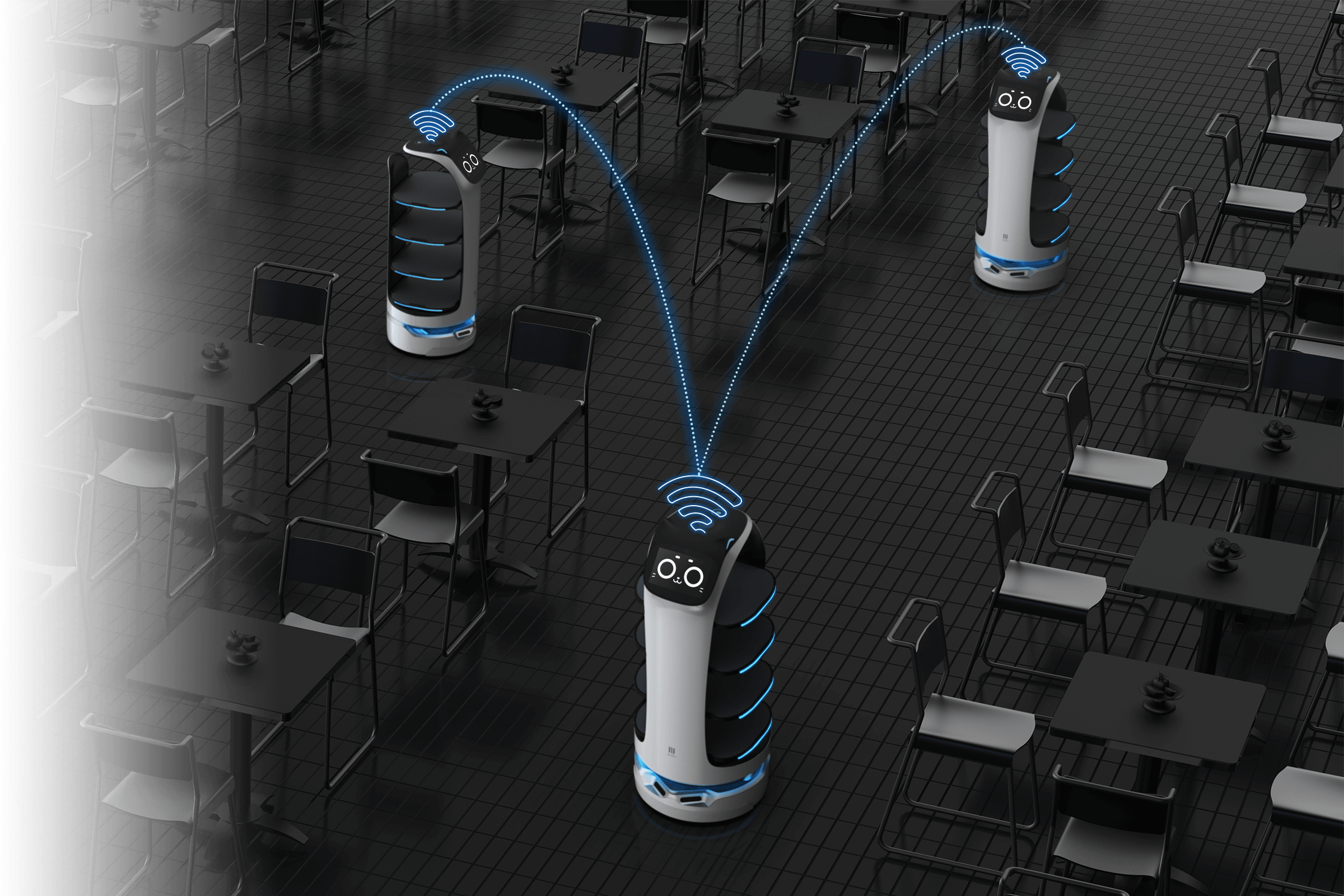
「ヒトとヒトとのコミュニケーション」をモデルとして、刻々と変わるレストラン内の状況に合わせ、それぞれのロボットが協働する任意のロボットと直接通信。コンピューティングの負荷を分散させ、ロボット稼働スケジュールの柔軟な運用を実現しました。
*初代BROOKLNとの比較
Bella
MIRPudu-Plus
CAESARPudu
BROOKLYN*初代MOHISMとの比較
Bella
Pudu-Plus
MOHISM II 1153Pudu
MOHISM 526
PUDU CLOUDは私達が独自に開発したサービスロボット運営に必要なクラウドサービスパッケージです。
業務管理・最適化管理・データ収集・智能化サービスの四大モジュールから構成され
お客様のロボット活用の効果を最大化します。
音声
発光
接触
表情
新しく搭載された音声機能で、100種類以上のシーンを想定した会話が可能です。
日本語、英語、中国語、韓国語、フランス語、スペイン語に対応。

動作パターンに応じてBellaが全身のライトを駆使して発光し、
リアルタイムでBellaの状況をお知らせします。


ロボットコミュニケーションとしては新しい「スキンシップ」機能を搭載。
タッチセンサーによって、触れるとBellaがよろこんで応えます。

数十種類の表情機能によって、Bellaの豊かな感情を表現します。

生体工学をベースに「生き物にとって最も合理的なデザイン」を追求。その結果、基本動作(走る、曲がる、止まる)からより繊細な様々な動作までを、無駄なく流麗に行うフォルムが誕生しました。